发布者:admin
发布时间:2021-08-18
8月16日,《自然·生物医学工程》(Nature Biomedical Engineering)在线发表了朱向阳、谷国迎教授和麻省理工学院赵选贺教授的合作论文“操作感知一体化的软体神经假肢手”(A soft neuroprosthetic hand providing simultaneous myoelectric control and tactile feedback)。上海交通大学为论文第一作者和通讯作者单位,博士研究生张宁斌为论文共同第一作者。该论文也被Nature以“A tough prosthetic hand obeys the muscles’ commands”为题,作为研究亮点报道。

软体神经假肢手具有六个主动自由度,在气压驱动下可实现多种灵巧抓握手势。每个手指具有内嵌多段分布式硬质结构层的纤维增强软体结构,在气压驱动下具有一个弯曲自由度。特别是拇指具有一个额外的自由度,用于实现对掌运动。此外,手指固有的柔顺性使其在面对柔软、易碎物体时也能够进行自适应抓握。
驱动控制硬件设计采用分布式模块化思路。微型泵、阀、电路板、电池等器件可装在轻量化腰包中,气动软体手指、传感器等位于机械手本体中,腰包与机械手中的硬件通过隐藏的气管和电线进行连接。根据需要,所有器件均可集成于假肢的接收腔内。接收腔中嵌入了四个定制的肌电传感器,用来记录残肢目标肌肉的表面肌电信号,并解码截肢患者的运动意图。各个软体手指的指尖内置了水凝胶-弹性体混合结构的柔性压力传感器,并集成了电触觉系统,具备触觉压力等外部感知信息的神经反馈功能,可实现假肢手与神经系统的双向闭环控制。
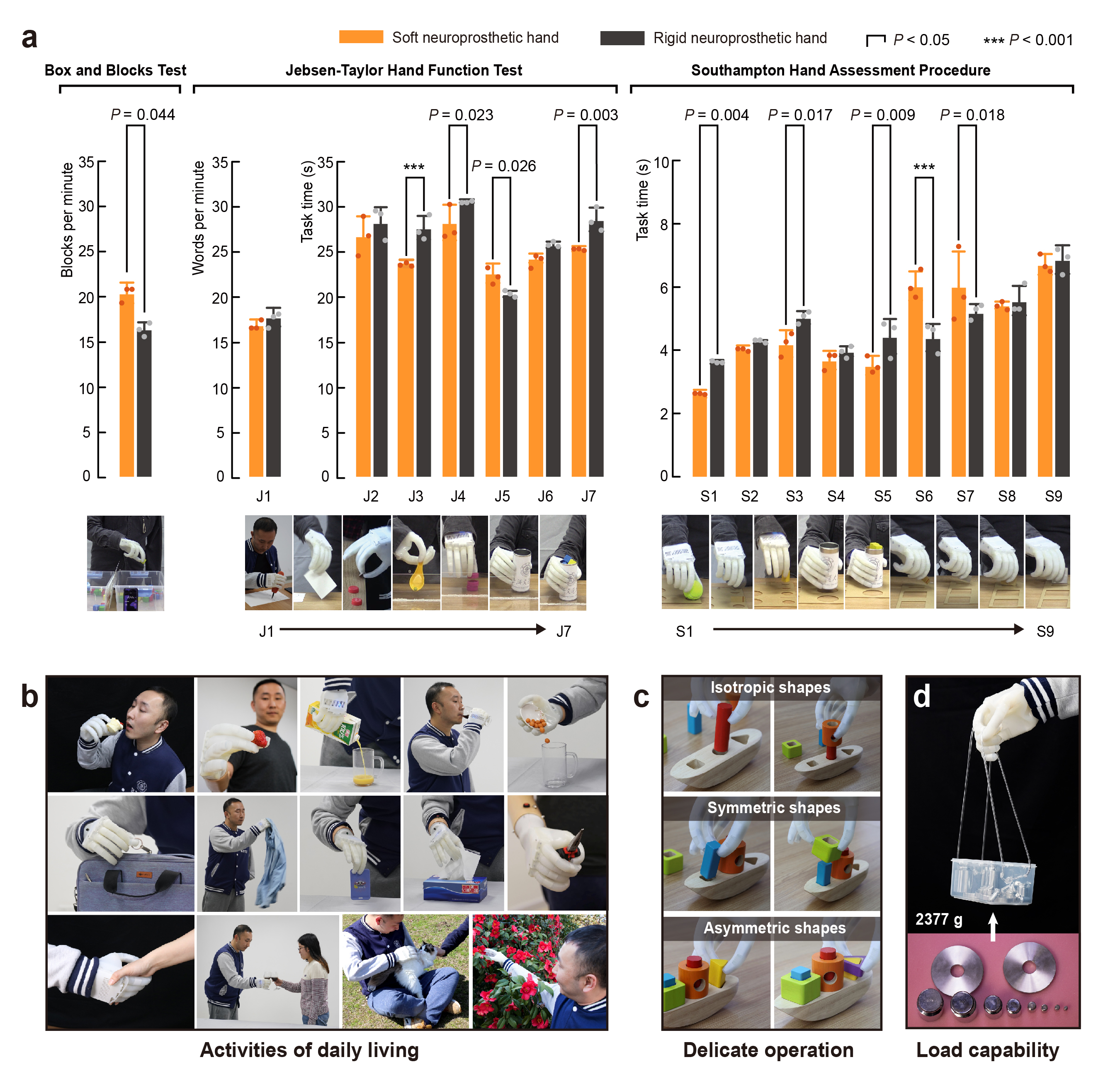
为了评估软体神经假肢手的使用性能,两位截肢患者按指定范式分别完成了软体假肢手和刚性假肢手的标准量化测试实验。实验结果统计分析表明,软体假肢手在速度和灵巧性方面优于传统的刚性神经假肢。当抓握草莓、面包和纸杯等柔软、易碎物品时,软体神经假肢手展示了更强的性能优势。此外,因软体假肢手重量大幅降低,受试者佩戴使用的舒适性明显提升。
日常生活应用验证实验表明,截肢受试者可以控制软体假肢手抓取和操作食物、日用品、工具等不同的物品,也可以与外界进行握手、触摸动植物等安全互动交互,完成捏取不同形状尺寸的物体并进行插槽等精细操作。
当指尖触觉传感器上的有效压力达到设定阈值时,将触发电刺激器产生电脉冲并刺激残肢肌肉的特定区域,实现触觉信号的神经反馈。在视觉-听觉屏蔽的交互实验中,随机按压软体神经假肢手的五个手指,截肢受试者可以准确分辨出任意单个或多个被按压的手指。实验结果表明,结合肌电控制和触觉反馈可实现软体神经假肢手的闭环控制。此外,通过对电脉冲的频率与压力传感器相对电容变化量的编码映射,截肢受试者可以恢复分级触觉感知能力,实现对不同尺寸抓握对象,如不同直径柱体的识别与分辨。

论文报道了一种集成肌电控制与触觉反馈的软体神经假肢手,能够帮助截肢受试者恢复多种手部灵巧操作功能、触觉感知反馈和闭环控制能力。其模块化的设计可实现高效的迭代设计、制造和控制。与商用刚性假肢相比,软体神经假肢手具有诸多优势,如固有的顺应性、轻便、低成本以及嵌入式的柔性触觉压力传感等。研究采用更先进的肌电解码算法和感知反馈方法,有望进一步提高软体神经假肢手的性能。研究工作为下一代柔顺、轻便、低成本的类生物体假肢技术的发展提供新的思路和方法。
论文研究工作得到了国家自然科学基金、上海市科委“科技创新行动计划”等科技计划项目的支持。